力扣LCR140题:训练计划II - 链表中倒数第k个节点解法详解
3个月前 (06-17)

内容简介
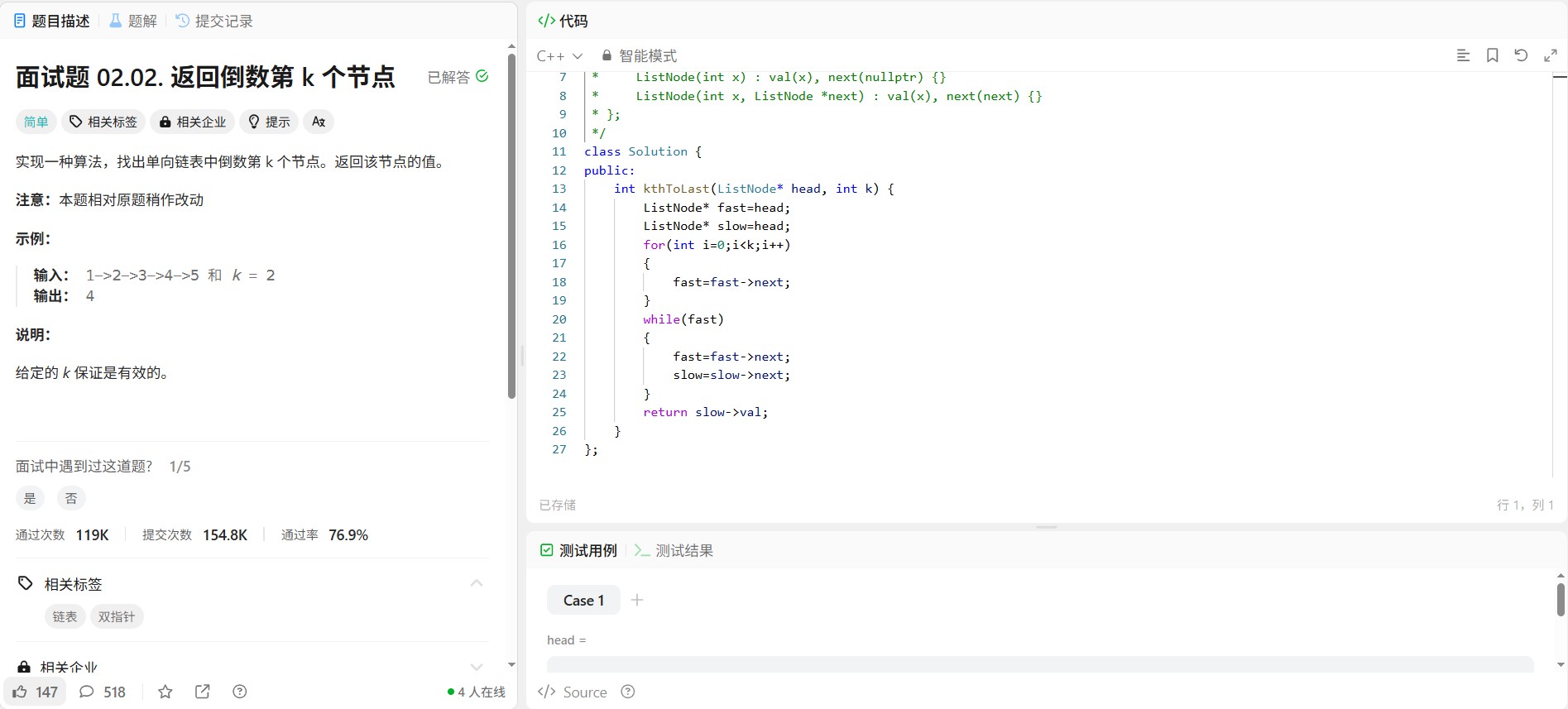
本文详细解析了力扣LCR140题"训练计划II"的链表操作解法,该题实际上是剑指Offer22题的变体,要求找出链表中倒数第k个节点。通过快慢指针技巧,只需一次遍历即可高效解决问题,时间复杂度为O(n)。文章包含完整注释代码、算法思路讲解和复杂度分析,帮助读者掌握链表操作的核心技巧。
算法思路
双指针初始化:快指针(fast)和慢指针(slow)都指向链表头节点
快指针先行:快指针先向前移动k个节点,构建两指针间的固定距离
同步移动:两指针同时移动,直到快指针到达链表末尾
慢指针定位:此时慢指针指向的就是倒数第k个节点
代码实现(带详细注释)
class Solution {
public:
ListNode* trainingPlan(ListNode* head, int cnt) {
ListNode* fast = head; // 快指针,用于先行探测
ListNode* slow = head; // 慢指针,最终指向目标节点
// 快指针先移动cnt步,建立两指针间的距离
while(cnt-- && fast) { // 添加fast判空防止k大于链表长度
fast = fast->next;
}
// 两指针同步移动,直到快指针到达链表末尾
while(fast) {
fast = fast->next;
slow = slow->next;
}
return slow; // 返回倒数第k个节点
}
};复杂度分析
时间复杂度:O(n),只需遍历链表一次
空间复杂度:O(1),仅使用常数空间
边界条件处理建议
空链表处理:添加头节点判空逻辑
k值过大处理:当k大于链表长度时返回nullptr
k值非法处理:添加对k≤0的情况处理
总结
快慢指针法是解决链表倒数第k个节点问题的高效方案,通过巧妙的两指针间距控制,避免了多次遍历链表,是面试中常见的考察点。理解这种解法有助于掌握链表操作和双指针技巧的核心思想
原创内容 转载请注明出处